丰禾公司加快生产进度,确保产品如期交付
2018年6月15日回转支承滚道淬火变形的原因分析
2018年7月4日小型回转支承作为工业机器人的关键配套件,是其不可或缺的一部分。目前,从机器人的发展趋势来看,现代机器人向更轻型化、精密化、智能化的方向发展, 这就要求与其配套的回转支承具有更加轻型的结构,制造装配工艺更加先进,通常情况下, 工业机器人回转支承的安装空间非常有限, 回转支承要在有限的安装空间里满足机器人主机对回转支承承载能力、刚度、精度和摩擦力矩的性能要求。选用标准的回转支承很难满足这种要求, 而轻型回转支承能够很好地解决了这一问题。
1 轻型回转支承的特点分析
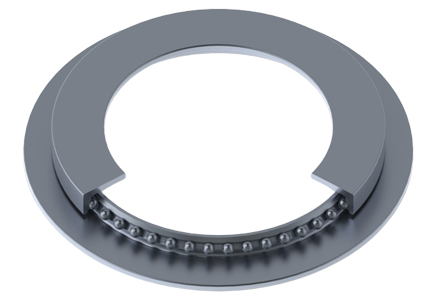
轻型四点接触球回转支承被广泛应用在工业机器人的关节部位,工业机器人用回转支承通常有密封和非密封两种结构形式, 具有钢球直径小、数量多, 能承受径向载荷、双向轴向载荷和倾覆力矩的特点。
2 主参数分析
轻型回转支承主参数的确定是以额定动载荷为目标函数, 在一定的约束条件下, 通过优化得到。对于工业机器人用轻型回转支承, 不仅要有较大的额定动载荷以保证有足够的承载能力, 还要有足够的刚度以保证机器人主机的定位精度和较小的摩擦力矩以保证灵活运转。因此, 仅以额定动载荷为目标函数来确定该轴承的主参数是不合理的。这就要求以额定动载荷、刚度和摩擦力矩作为目标函数进行多目标优化设计,找到球径和球数的最佳匹配形式,更为合理的选型。
3 关键结构参数分析
对于工业机器人用轻型回转支承, 套圈沟道曲率半径系数、沟道位置、挡边高度是重要的结构参数, 在设计中需要重点考虑。轻型回转支承的径向尺寸很小, 为增加保持架的强度,必须加大保持架的宽度。由于受密封圈位置的限制, 为增大保持架的宽度, 该回转支承采用非对称沟位置的设计方式。
4 变形与刚度
在内径尺寸相同条件下, 轻型回转支承比普通回转支承容纳的钢球数量多, 因此改善了轴承内部应力的分布, 减小了钢球与沟道接触处的弹性变形, 提高了回转支承的刚度。由于轻型回转支承通常对轴承座的刚度比较敏感,因此,该轴承的设计需对回转支承和轴承座这一轴系的刚度进行系统分析, 以保证轻型回转支承的使用性能。